题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
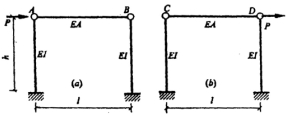
已测得下图(a)结构各点的挠度,求下图(b)结构在荷载作用下支座A的反力。
已测得下图(a)结构各点的挠度,求下图(b)结构在荷载作用下支座A的反力。

查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
已测得下图(a)结构各点的挠度,求下图(b)结构在荷载作用下支座A的反力。
如果结果不匹配,请 联系老师 获取答案
 更多“已测得下图(a)结构各点的挠度,求下图(b)结构在荷载作用下…”相关的问题
更多“已测得下图(a)结构各点的挠度,求下图(b)结构在荷载作用下…”相关的问题
下图所示为一个三自由平面操作机。已知操作机的结构尺寸和输入运动参数θ1、θ2及θ3(如图中所示)。试求该操作机末端执行器的位姿方程。

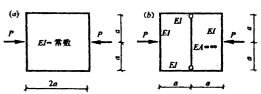
已知下图(a)所示结构角点处截面弯矩为Pa/8(外侧受拉),利用这一结论,计算下图(b)所示结构,并作弯矩图。
激光工作物质的能级图如下图所示,泵浦激光的频率调到3-0跃迁的中心频率,当泵浦光强Ip无限增加时,求能级2-能级1能级间小信号反转集居数密度△n0(假设各能级的统计权重均为1)。

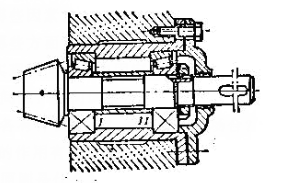
下图所示为反排列轴承的支承结构。若已拆下轴承盖,应先拆( )。
A.轴承Ⅰ B.轴承Ⅱ C.套筒 D.圆螺母
下图所示结构仅取C点的转角为基本未知量,其位移法方程的系散r11=()

A.3i
B.6i
C.9i
D.12i