 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
描述线性时不变系统的动态方程为 推导出以g1、g2为状态变量的状态方程,并求取初始状态g1(0-)和
描述线性时不变系统的动态方程为
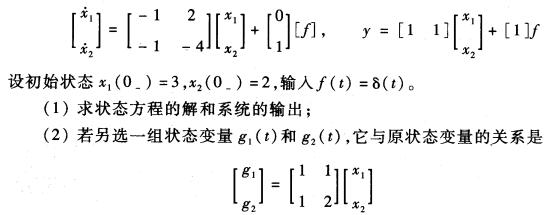 推导出以g1、g2为状态变量的状态方程,并求取初始状态g1(0-)和g2(0_); (3)求以g1、g2为状态变量的方程解和系统的输出。
推导出以g1、g2为状态变量的状态方程,并求取初始状态g1(0-)和g2(0_); (3)求以g1、g2为状态变量的方程解和系统的输出。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
描述线性时不变系统的动态方程为
推导出以g1、g2为状态变量的状态方程,并求取初始状态g1(0-)和g2(0_); (3)求以g1、g2为状态变量的方程解和系统的输出。
如果结果不匹配,请 联系老师 获取答案
 更多“描述线性时不变系统的动态方程为 推导出以g1、g2为状态变量…”相关的问题
更多“描述线性时不变系统的动态方程为 推导出以g1、g2为状态变量…”相关的问题
已知线性时不变系统的状态方程和输出方程表示为

且有CB=0,CAB=0,…,CAk-1B=0。
证明:
一个线性时不变系统用常系数差分方程来表征,
简述可以用N点DFT绘出频率响应H(ejω)的N个采样值的方法。
如图8—14所示的复合系统由两个线性时不变子系统Sa和Sb组成,其状态方程和输出方程分别为
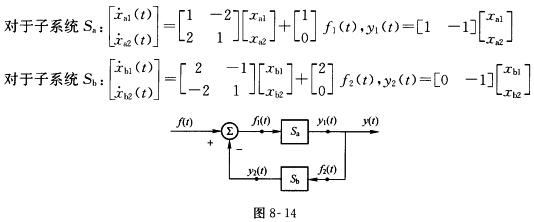
写出复合系统的状态方程和输出方程的矩阵形式。
A.对状态矢量的线性变换实质是换基
B.非奇异线性变换后的系统特征值不变
C.非奇异线性变换后的系统运动模态不变
D.同一线性时不变系统的两个状态空间描述不可以非奇异线性变换互相转换
A.与截面的弯矩成正比,与梁的抗弯刚度成反比
B.与截面的弯矩成反比,与梁的抗弯刚度成正比
C.与截面的弯矩成反比,与梁的截面系数成正比
D.与截面弯矩成正比,与梁的截面系数成反比
若选取另-个状态变量ρ1(t)和ρ2(t),它与原状态变量的关系是:
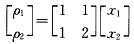 推导出以ρ1(t)和ρ2(t)为状态变量的状态方程,并求出初始状态ρ1(0-),ρ2(0-)。
推导出以ρ1(t)和ρ2(t)为状态变量的状态方程,并求出初始状态ρ1(0-),ρ2(0-)。

















