

 如果结果不匹配,请
如果结果不匹配,请 
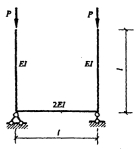
 更多“列出下图所示体系的稳定方程。”相关的问题
更多“列出下图所示体系的稳定方程。”相关的问题
第2题
下图所示结构仅取C点的转角为基本未知量,其位移法方程的系散r11=() A.3iB.6iC.9iD.12i
下图所示结构仅取C点的转角为基本未知量,其位移法方程的系散r11=()

A.3i
B.6i
C.9i
D.12i
第3题
下图所示三个体系的临界荷裁的关系是() A.Pcra>Pcrb>PcrcB.Pcra=Pcrb>PcrcC. Pcra<Pcrb<Pc
下图所示三个体系的临界荷裁的关系是()
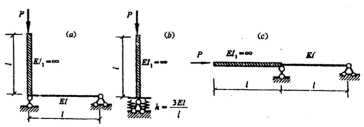
A.Pcra>Pcrb>Pcrc
B.Pcra=Pcrb>Pcrc
C. Pcra<Pcrb<Pcrc
D.Pcra=Pcrb=Pcrc
第4题
下图所示体系属于分支点失稳的是 () A.(a)(b)B.(c)(d)C.只有(c)D.只有(d)
下图所示体系属于分支点失稳的是 ()
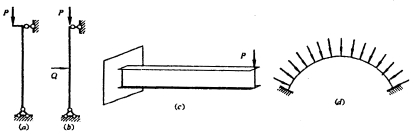
A.(a)(b)
B.(c)(d)
C.只有(c)
D.只有(d)




第10题
下图所示为一个三自由平面操作机。已知操作机的结构尺寸和输入运动参数θ1、θ2及θ3(如图中所示)。试求该操作机
下图所示为一个三自由平面操作机。已知操作机的结构尺寸和输入运动参数θ1、θ2及θ3(如图中所示)。试求该操作机末端执行器的位姿方程。

第11题
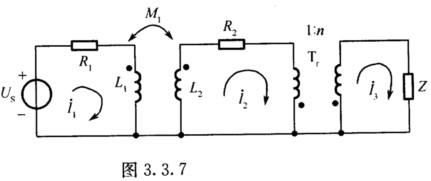
下列是求系统响应y(k)的-段程序: 列出相应的状态方程和输出方程。以x1(k)、x2(k)为状态
下列是求系统响应y(k)的-段程序:
 列出相应的状态方程和输出方程。
列出相应的状态方程和输出方程。
以x1(k)、x2(k)为状态变量,列出系统的状态方程和输出方程。
















