

 如果结果不匹配,请
如果结果不匹配,请 
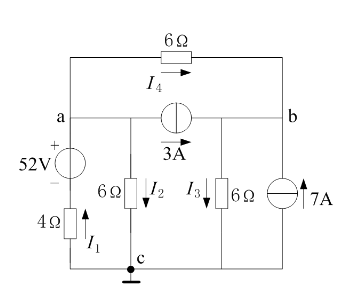
 更多“如图所示,分别以a、b为参考点,用节点电位法求各支路电流。”相关的问题
更多“如图所示,分别以a、b为参考点,用节点电位法求各支路电流。”相关的问题

第2题
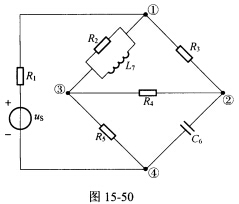
(北京交通大学2008年考研试题)试求图15—50所示电路的节点电压方程的矩阵形式,以节点④为参考点。
(北京交通大学2008年考研试题)试求图15—50所示电路的节点电压方程的矩阵形式,以节点④为参考点。

第4题
(大连理工大学2005年考研试题)如图15—27所示为有向拓扑图,实线为树支,虚线为连支。(1)以节点4为参
(大连理工大学2005年考研试题)如图15—27所示为有向拓扑图,实线为树支,虚线为连支。(1)以节点4为参考点,写出电路的降价关联矩阵A;(2)按连支由小到大排序,写出单连支回路矩阵Bf;(3)按树支由小到大排序,写出单树支割集矩阵Qf。

第5题
如图1-5所示电路,U1=7V,U2=-4V,U3=2V,U4=-5V,U5=-9V,若分别以D点或B点作参考点,求φA、φB、φC及UAC。
如图1-5所示电路,U1=7V,U2=-4V,U3=2V,U4=-5V,U5=-9V,若分别以D点或B点作参考点,求φA、φB、φC及UAC。

第6题
一维势阱V(x)中粒子的能量本征方程为 设存在束缚态,取基态能量E0(有限,E0≠-∞)为参考点,即E0=0,则基态波
一维势阱V(x)中粒子的能量本征方程为

设存在束缚态,取基态能量E0(有限,E0≠-∞)为参考点,即E0=0,则基态波函数ψ0(x)满足

ψ0(x)无节点(边界点除外).考虑如下能量本征方程,

显然

因此H-可以表示为

定义算符


第10题
关于桥梁振型测试的相关操作,下列做法错误的有___
A.固定参考点应放置于桥外固定不动的部位
B.当振型测点较多,传感器数量不足时,可分批次测试
C.当桥跨较长,传感器导线长度不足时,可移动参考点位置
D.以各测点位置为x、各测点的振幅峰值为y绘制成图即为结构振型图
第11题
对于FANUC15数控系统,下列说法正确的是( )。
A.FANUC15数控系统中的AC伺服电动机内部装有绝对位置编码器,当系统重新上电后机床必须重新进行参考点的复归动作
B.FANUC15数控系统中的AC伺服电动机内部装有绝对位置编码器,当系统重新上电后机床不需重新进行参考点的复归动作
C.FANUC15数控系统中的AC伺服电动机内部没有绝对位置编码器,当系统重新上电后机床必须重新进行参考点的复归动作
D.FANUC15数控系统中的AC伺服电动机内部装有绝对位置编码器,因此系统可以实现对主轴的精确定位控制
















