 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
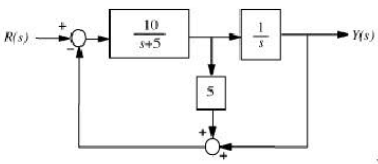
控制系统方框图如图所示。系统性能指标要求:速度误差系数Kv=15,相位裕量γ≥45°,剪切频率ωc≥3.5rad·s-1。试确定
控制系统方框图如图所示。系统性能指标要求:速度误差系数Kv=15,相位裕量γ≥45°,剪切频率ωc≥3.5rad·s-1。试确定校正装置传递函数Gc(s),并在对数坐标纸上绘出校正前系统传递函数、校正装置传递函数及校正后系统传递函数的对数频率特性。

查看答案

 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“控制系统方框图如图所示。系统性能指标要求:速度误差系数Kv=…”相关的问题
更多“控制系统方框图如图所示。系统性能指标要求:速度误差系数Kv=…”相关的问题
 ,-∞<k<∞时,响应
,-∞<k<∞时,响应


 时,响应为
时,响应为 。
。
 。 (1)确定控制器参数k、p、z的值。要求满足以下条件: 1)闭环系统稳定。 2)使系统主导极点具有:ζ=0.5、ωn=4rad/s。 3)使系统的稳态速度误差系数Kv=1.5s-1。 (2)画出校正后系统的概略根轨迹图(参数k从0→∞,不要求算出特征点的准确值)。 (3)采用主导极点法简化校正后的高阶系统,并求出它的闭环传递函数。
。 (1)确定控制器参数k、p、z的值。要求满足以下条件: 1)闭环系统稳定。 2)使系统主导极点具有:ζ=0.5、ωn=4rad/s。 3)使系统的稳态速度误差系数Kv=1.5s-1。 (2)画出校正后系统的概略根轨迹图(参数k从0→∞,不要求算出特征点的准确值)。 (3)采用主导极点法简化校正后的高阶系统,并求出它的闭环传递函数。




















