题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
设控制系统结构图如图3-24所示,控制信号为r(t)=1(t)(rad)。试分别确定当Kh为1和0.1时,系统输出量的位置误差。
设控制系统结构图如图3-24所示,控制信号为r(t)=1(t)(rad)。试分别确定当Kh为1和0.1时,系统输出量的位置误差。

查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
设控制系统结构图如图3-24所示,控制信号为r(t)=1(t)(rad)。试分别确定当Kh为1和0.1时,系统输出量的位置误差。
如果结果不匹配,请 联系老师 获取答案
 更多“设控制系统结构图如图3-24所示,控制信号为r(t)=1(t…”相关的问题
更多“设控制系统结构图如图3-24所示,控制信号为r(t)=1(t…”相关的问题
控制系统结构图如图3-64所示。
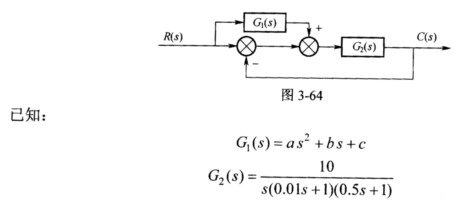 试选择参数a,b,c的值,使系统响应速度信号时无稳态误差。
试选择参数a,b,c的值,使系统响应速度信号时无稳态误差。
设采样系统结构图如图7-6所示,其中r(t)=δ(t),T=0.1。试求采样输出c(nT),n=0,1,2,3。
设系统结构图如图9-7所示,∑1的传递函数为

(武汉科技大学2004年硕士研究生入学考试试题)系统如图3-24所示。
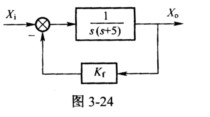 试确定Kf,使当输入为单位斜坡信号时,系统的稳态误差为1%。
试确定Kf,使当输入为单位斜坡信号时,系统的稳态误差为1%。
(哈尔滨工业大学2004年硕士研究生入学考试试题)设控制系统如图3-28所示,
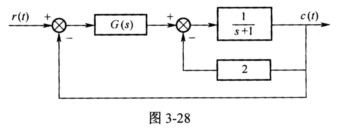 其中前向通道中G(s)的单位阶跃响应为1-1.25e-3tsin(5t+53.1°),求r(t)=10.1(t)时系统的稳态误差。
其中前向通道中G(s)的单位阶跃响应为1-1.25e-3tsin(5t+53.1°),求r(t)=10.1(t)时系统的稳态误差。
在某车辆控制系统中,车轮转速与转向的关系如图T12.2-1所示,呈“W”形。请设计一个车轮转速控制电路,输入是转向电压(模拟)0~16V,输出是转速控制电压(模拟)0~15V。控制误差可以暂不考虑。

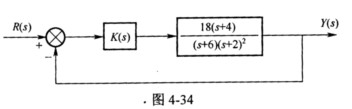
(中国科学院一中国科学技术大学2007年硕士研究生入学考试试题)反馈控制系统如图4-34所示,取控制器
 。
。
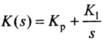 (1)确定控制器参数Kp、Kl的值,使:①闭环系统稳定:②根轨迹的主要分支过闭环极点-1.52±j3.48。 (2)闭环极点-1.52±j3.48是否为系统的主导极点? (3)分析该校正方法提高了系统的控制精度。
(1)确定控制器参数Kp、Kl的值,使:①闭环系统稳定:②根轨迹的主要分支过闭环极点-1.52±j3.48。 (2)闭环极点-1.52±j3.48是否为系统的主导极点? (3)分析该校正方法提高了系统的控制精度。
系统结构图如图9-10所示,其中
∑1:
y1=[-2 1]X1
∑2:=2x2+u2

y2=x2
试: