题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
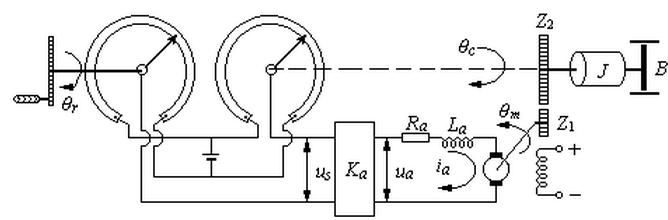
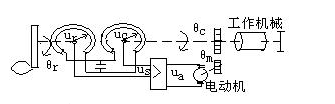
位置随动系统的原理图如图1-9所示。试说明系统的工作原理,并画出系统的方框图。
位置随动系统的原理图如图1-9所示。试说明系统的工作原理,并画出系统的方框图。
 答案
答案
控制任务:控制机械负载的位置,使其与参考位置相协调。
被控对象:工作机械(负载);被控量:角位置θc。
工作原理:当工作机械的角位置θc与输入量的角位置θr指示方向一致时,us=0,交流放大器输出电压ua=0,电动机静止,工作机械保持原来的协调方向。当输入量的角位置θr转过一个角度,θ
 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“位置随动系统的原理图如图1-9所示。试说明系统的工作原理,并…”相关的问题
更多“位置随动系统的原理图如图1-9所示。试说明系统的工作原理,并…”相关的问题
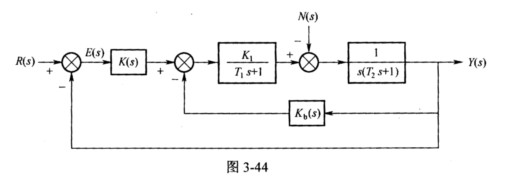 (1)系统的输入和干扰信号均为单位阶跃信号,当K(s)=K时,试确定系统的稳态误差。 (2)欲使系统对单位阶跃信号的稳态误差为零,K(s)=K应取何种形式?(简述理由,不要求计算)
(1)系统的输入和干扰信号均为单位阶跃信号,当K(s)=K时,试确定系统的稳态误差。 (2)欲使系统对单位阶跃信号的稳态误差为零,K(s)=K应取何种形式?(简述理由,不要求计算)




 ,已知Tm=0.5s,Kobj为电压放大、功率放大及调节对象放大系数的乘积,数值较大。现要求:超调量σ≤5%,过渡过程时间ts=300ms。试用并联校正对系统进行动态设计。
,已知Tm=0.5s,Kobj为电压放大、功率放大及调节对象放大系数的乘积,数值较大。现要求:超调量σ≤5%,过渡过程时间ts=300ms。试用并联校正对系统进行动态设计。