 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
设A、B、C及D都是Hermite正定矩阵,且A-1C和BD-1的特征值按式(6.86)排序,则的最小值只能在或者处取得. η1≥η2≥
设A、B、C及D都是Hermite正定矩阵,且A-1C和BD-1的特征值按式(6.86)排序,则
η1≥η2≥…≥ηn,μ1≥μ2≥…≥μn(6.86)
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
设A、B、C及D都是Hermite正定矩阵,且A-1C和BD-1的特征值按式(6.86)排序,则
η1≥η2≥…≥ηn,μ1≥μ2≥…≥μn(6.86)
如果结果不匹配,请 联系老师 获取答案
 更多“设A、B、C及D都是Hermite正定矩阵,且A-1C和BD…”相关的问题
更多“设A、B、C及D都是Hermite正定矩阵,且A-1C和BD…”相关的问题
设A、B、C及D都是Hermite正定矩阵,它们的特征值依次为
a1≥a2≥…≥an,b1≥b2≥…≥bn
c1≥c2≥…≥cn,d1≥d2≥…≥dn,
则αP的一个近似值为
设A、B、C及D都是Hermite正定矩阵,且A-1C和BD-1的特征值按式(6.86)排序,则ρ(P)的唯一最小点是
η1≥η2≥…≥ηn,μ1≥μ2≥…≥μn(6.86)
设A是n阶实对称正定矩阵,则由格式(2.21)得到的向量序列{r(k)}和{z(k)}满足
[r(k),z(k-1)]=0,[r(k),r(l)]=0,[z(k),Az(l)]=0(k≠l).(2.22)
A.若目标函数的海森矩阵H(X)对应的行列式的顺序主子式的值都小于零,则此海森矩阵H(X)为正定矩阵
B.牛顿法寻优时的搜索方向是向量表示的方向
C.利用复合形法进行优化设计时,每一轮迭代中求出的映射点只要满足可行性条件就可以作为一个寻优点
D.机械优化设计中的可行域必须是一个有界的闭域。
A.变量轮换法的方法是依次沿相应的坐标轴方向进行的一维优化,收敛速度较慢
B.二维正定二次函数的等值线是同心的椭圆族,且椭圆中心就是以该函数为目标函数的极小点
C.用梯度法寻求目标函数的最小值时,就是沿目标函数方向上的一维搜索寻优法
D.利用复合形法进行优化设计时,构造初始复合形的全部顶点都必须在可行城内选取。
设随机变量X的密度函数为
(1)试求一次矩v1;
(2)用v1把参数θ表示出来;
(3)设X1,X2,…,Xn是来自X的样本,并取的估计量,
,问此时θ
的估计量=?
设β(t)及φ(t)在每一有限间隔[0,T]上都是有界变差函数且于t→∞时β(t)→B,φ(t)→±∞,又设β(t)在[0,∞)内连续并且对一切T>0而言有条件Vφ≠(T)/|φ(T)|<K(K为常数).于是有








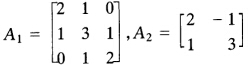 试求‖A1‖2,‖A2‖2,ρ(A1),ρ(A2)。
试求‖A1‖2,‖A2‖2,ρ(A1),ρ(A2)。









