 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
已知离散系统的动态方程为 初始状态为,激励f(k)=u(k),求:
已知离散系统的动态方程为
初始状态为,激励f(k)=u(k),求:
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
已知离散系统的动态方程为
初始状态为,激励f(k)=u(k),求:
如果结果不匹配,请 联系老师 获取答案
 更多“已知离散系统的动态方程为 初始状态为,激励f(k)=u(k)…”相关的问题
更多“已知离散系统的动态方程为 初始状态为,激励f(k)=u(k)…”相关的问题
描述线性时不变系统的动态方程为
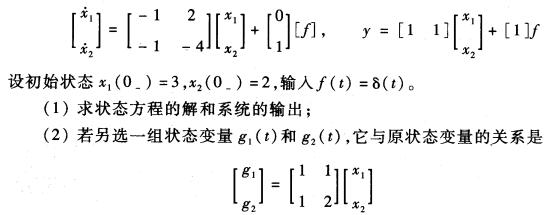 推导出以g1、g2为状态变量的状态方程,并求取初始状态g1(0-)和g2(0_); (3)求以g1、g2为状态变量的方程解和系统的输出。
推导出以g1、g2为状态变量的状态方程,并求取初始状态g1(0-)和g2(0_); (3)求以g1、g2为状态变量的方程解和系统的输出。
已知一离散系统的状态方程和输出方程表示为
λ1(n+1)=λ1(n)-λ2(n)
λ2(n+1)=-λ1(n)-λ2(n)
y(n)=λ1(n)λ2(n)+x(n)
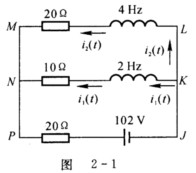
已知电路的有关数据如图2—1所示,且初始电流为0,试求各支路上的电流i1(t),i2(t).
考虑随机相位调制信号的估计问题。假设离散的状态方程和观测方程分别为
sk=0.85sk-1+ωk-1
和
xk=Acos(ω0k+0.5sk)+nk,k=1,2,…
其中,余弦信号的振幅a和频率ω0为已知常数;ωk-1(k≥1)和nk(k≥1)都是均值为零、
方差为1的白噪声随机序列,且二者互不相关。求信号的状态估计量 。可见这是一个
。可见这是一个
对随机相位调制信号的估计问题,请用推广的离散卡尔曼滤波实现这种估计。
一台凸极式电机的功角方程为
Pe=Pmaxsinδ+PKsin2δ
假设初始运行功角δ0的微小偏移量为△δ,即δ=δ0+△δ。求同步功率系数[参照式(11.39)]和△δ的线性化摆动方程。


















