题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
如图所示为喇叭馈源单脉冲雷达天线系统的和差比较器。它由4个波导匹配双T组成。设四路接收信号电压(,,,)依次
如图所示为喇叭馈源单脉冲雷达天线系统的和差比较器。它由4个波导匹配双T组成。设四路接收信号电压(

(1)TⅢ的和臂的输出
(2)TⅣ的和臂的输出
(3)TⅣ的差臂的输出
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如图所示为喇叭馈源单脉冲雷达天线系统的和差比较器。它由4个波导匹配双T组成。设四路接收信号电压(
(1)TⅢ的和臂的输出
(2)TⅣ的和臂的输出
(3)TⅣ的差臂的输出
如果结果不匹配,请 联系老师 获取答案
 更多“如图所示为喇叭馈源单脉冲雷达天线系统的和差比较器。它由4个波…”相关的问题
更多“如图所示为喇叭馈源单脉冲雷达天线系统的和差比较器。它由4个波…”相关的问题
单脉冲体制空管二次监视雷达的最大仪表作用距离不应小于()
A.250公里
B.250海里
C.200公里
D.200海里
单脉冲体制空管二次监视雷达距离分辨力不应大于(),方位分辨力不应大于()
A.29m,0.6°
B.29m,0.022°
C.75m,0.6°
D.75m,0.022°
单脉冲体制空管二次监视雷达在所有方位上,高度角在 0.5°~50°时,最小作用距离不应大于()
A.0.5海里
B.0.5公里
C.1海里
D.1公里
雷达站选址时遮蔽分析的目的:
A.确定雷达天线的高度,以确保所考虑到的各个空中定位点均在雷达覆盖范围内
B.发现周边障碍物,对周边障碍物进行定位,了解周边场地环境影响的程度
C.分析周边障碍物对雷达覆盖的影响,对影响较大的障碍物进行消除
D.了解周边障碍物的覆盖影响,为雷达建设时调整仰角做准备
工程上可用微型便携式雷达来测量转速,如图所示,设雷达发射的电磁波束的波长为λ0(常用0.0225m),入射到半径为R,角速度为ω的飞轮上。过入射点的切线与入射波所成夹角为θ,并由原位置的雷达测得反射波所增加的频率为νd,求该飞轮的角速度。








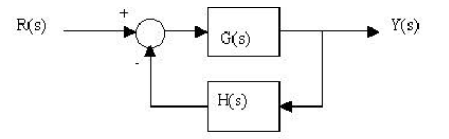
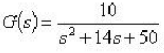 ,试确定系统对阶跃输入和斜坡输入的稳态误差。()
,试确定系统对阶跃输入和斜坡输入的稳态误差。()