 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[判断题]
机器人控制系统的任务是根据机器人的作业指令程序及从传感器反馈回来的信号,控制机器人的执行机构,使其完成规定的运动和功能;该部分的作用相当于人的肌肉。()
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
 更多“机器人控制系统的任务是根据机器人的作业指令程序及从传感器反馈…”相关的问题
更多“机器人控制系统的任务是根据机器人的作业指令程序及从传感器反馈…”相关的问题
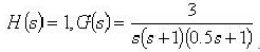 ,试设计一个滞后校正网络Gc(s),使系统的相角裕度达到45°。()
,试设计一个滞后校正网络Gc(s),使系统的相角裕度达到45°。()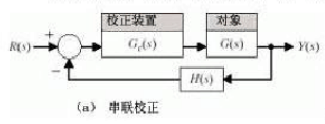
A.Gc(s)=(1-20s)/(1-106s)
B.Gc(s)=(10+20s)/(1+106s)
C.Gc(s)=(10-20s)/(1+106s)
D.Gc(s)=(1+20s)/(1+106s)
A.具有很高的可达性
B.所需关节驱动力矩小,能量消耗较少
C.采用直线滚动导轨后,速度高,定位精度高
D.在X、Y和Z坐标轴方向上的运动没有耦合作用,对控制系统设计相对容易些

















