 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
三参数模型如图8-21所示:(1)求该模型的蠕变柔量表达式;(2)已知模型参数σ0=1×109dyn/cm2,E1=5×109dyn/cm2,E2
三参数模型如图8-21所示:(1)求该模型的蠕变柔量表达式;(2)已知模型参数σ0=1×109dyn/cm2,E1=5×109dyn/cm2,E2=1×109dyn/cm2,η3=5×109(dyn·s)/cm2。求5s后模型的形变量。

查看答案

 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“三参数模型如图8-21所示:(1)求该模型的蠕变柔量表达式;…”相关的问题
更多“三参数模型如图8-21所示:(1)求该模型的蠕变柔量表达式;…”相关的问题


 (1)建立闭环系统的状态模型。 (2)求闭环系统的传递函数
(1)建立闭环系统的状态模型。 (2)求闭环系统的传递函数 。
。

 。
。
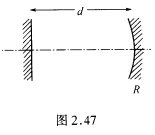 (1)画出等效透镜波导,并标出可用于求解球面镜上光斑半径的一个周期,写出ABCD矩阵; (2)利用ABCD矩阵求球面镜上的光斑半径ωs。
(1)画出等效透镜波导,并标出可用于求解球面镜上光斑半径的一个周期,写出ABCD矩阵; (2)利用ABCD矩阵求球面镜上的光斑半径ωs。
 ;
;

















