


 如果结果不匹配,请
如果结果不匹配,请 
 更多“对绘制图所示系统的根轨迹,应用劳斯判据分析系统的稳定性。”相关的问题
更多“对绘制图所示系统的根轨迹,应用劳斯判据分析系统的稳定性。”相关的问题
第4题
下图所示系统,其中,a>0,b>0为待定参数,已知G(j1)=-2。 (1)确定参数a,b的值,并作出G(s)的奈奎斯特曲线; (2)
下图所示系统,其中
(1)确定参数a,b的值,并作出G(s)的奈奎斯特曲线;
(2)用奈奎斯特稳定判据确定使闭环系统稳定的K值范围。

第7题
(2009年)如图4.7—4所示为某闭环系统的动态结构图,其中K>0,它的根轨迹为()。 A.整个负实轴B.
(2009年)如图4.7—4所示为某闭环系统的动态结构图,其中K>0,它的根轨迹为()。
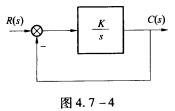
A.整个负实轴
B.整个虚轴
C.虚轴左面平行于虚轴的直线
D.虚轴左面的一个圆
第8题
在反馈系统稳定性研究中,有时还应用“罗斯(Routh)判据(或准则)”,利用它可确定多项式的根是否都位于s左半平面
在反馈系统稳定性研究中,有时还应用“罗斯(Routh)判据(或准则)”,利用它可确定多项式的根是否都位于s左半平面。这里只说明对二、三阶多项式的判据。二阶多项式s2+αs+β的根都位于左半平面的充分必要条件是所有项的系数具有相同的符号;对三阶多项式s3+αs+βs+γ,除上述系数同号条件外,还应满足aβ>γ。根据上述说明,试判断下列各多项式的根是否都位于s左半平面:
第9题
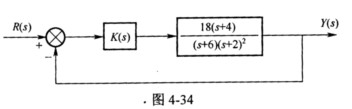
(中国科学院一中国科学技术大学2007年硕士研究生入学考试试题)反馈控制系统如图4-34所示,取控制
(中国科学院一中国科学技术大学2007年硕士研究生入学考试试题)反馈控制系统如图4-34所示,取控制器
 。
。
 (1)确定控制器参数Kp、Kl的值,使:①闭环系统稳定:②根轨迹的主要分支过闭环极点-1.52±j3.48。 (2)闭环极点-1.52±j3.48是否为系统的主导极点? (3)分析该校正方法提高了系统的控制精度。
(1)确定控制器参数Kp、Kl的值,使:①闭环系统稳定:②根轨迹的主要分支过闭环极点-1.52±j3.48。 (2)闭环极点-1.52±j3.48是否为系统的主导极点? (3)分析该校正方法提高了系统的控制精度。


















