 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
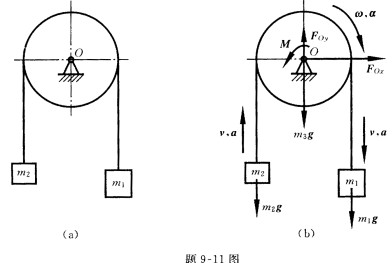
阿脱武德机。图2.8(a)所示的装置称为阿脱武德机,左、右两边原挂有质量均为M的物块,在右物块上又放有质量为m的
阿脱武德机。图2.8(a)所示的装置称为阿脱武德机,左、右两边原挂有质量均为M的物块,在右物块上又放有质量为m的小物块。忽略滑轮和绳的质量以及轮轴上的摩擦,求左物上升的加速度、m与M之间的作用力以及支点A所承受的力。

查看答案

 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“阿脱武德机。图2.8(a)所示的装置称为阿脱武德机,左、右两…”相关的问题
更多“阿脱武德机。图2.8(a)所示的装置称为阿脱武德机,左、右两…”相关的问题
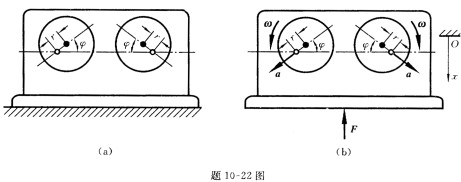
 (1)滑轮为光滑的; (2)滑轮与软绳间有足够的摩擦力,而轴承中的摩擦力不计; (3)假定轴承中的摩擦力矩为M。
(1)滑轮为光滑的; (2)滑轮与软绳间有足够的摩擦力,而轴承中的摩擦力不计; (3)假定轴承中的摩擦力矩为M。
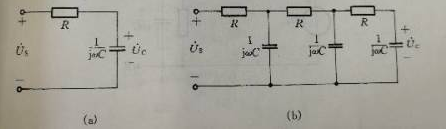
 ,若以u1(t)为输入,u2(t)为输出,求
,若以u1(t)为输入,u2(t)为输出,求


















