题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
某线性时不变系统的状态方程和输出方程分别为 =+ =+ 设系统的初始状态 = 输入e1(t)=u(t),e2(t)=δ(t),试
某线性时不变系统的状态方程和输出方程分别为
=
+
=
+
设系统的初始状态=
输入e1(t)=u(t),e2(t)=δ(t),试用时域法、变换域法求状态变量和输出响应。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
某线性时不变系统的状态方程和输出方程分别为
=
+
=
+
设系统的初始状态=
输入e1(t)=u(t),e2(t)=δ(t),试用时域法、变换域法求状态变量和输出响应。
如果结果不匹配,请 联系老师 获取答案
 更多“某线性时不变系统的状态方程和输出方程分别为 =+ =+ 设系…”相关的问题
更多“某线性时不变系统的状态方程和输出方程分别为 =+ =+ 设系…”相关的问题
给定线性时不变系统的状态方程和输出方程
r(t)=Cλ(t)
其中 A=
如图8—14所示的复合系统由两个线性时不变子系统Sa和Sb组成,其状态方程和输出方程分别为
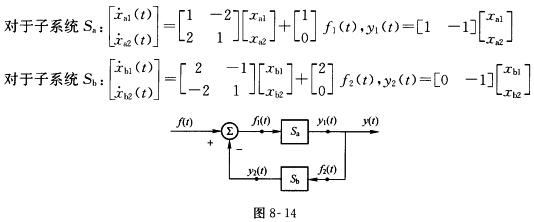
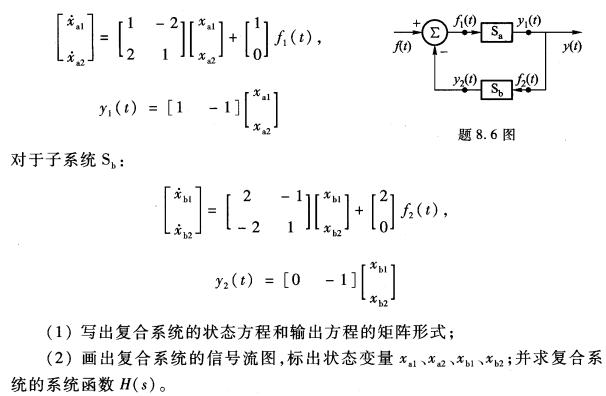
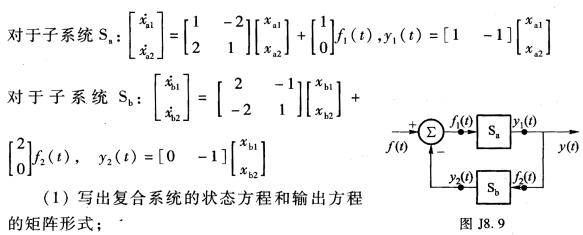
写出复合系统的状态方程和输出方程的矩阵形式。
已知线性时不变系统的状态方程和输出方程表示为
且有CB=0,CAB=0,…,CAk-1B=0。
证明:
描述线性时不变系统的动态方程为
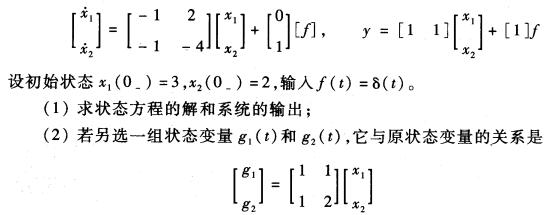 推导出以g1、g2为状态变量的状态方程,并求取初始状态g1(0-)和g2(0_); (3)求以g1、g2为状态变量的方程解和系统的输出。
推导出以g1、g2为状态变量的状态方程,并求取初始状态g1(0-)和g2(0_); (3)求以g1、g2为状态变量的方程解和系统的输出。
 (2)画出复合系统的信号流图,标出状态变量xa1、xa2、xb1、xb2;并求复合系统的系统函数H(s)。
(2)画出复合系统的信号流图,标出状态变量xa1、xa2、xb1、xb2;并求复合系统的系统函数H(s)。
如题8.6图所示的复合系统由两个线性时不变子系统Sa和Sb组成,其状态方程和输出方程分别为

对于子系统Sa
,
对于子系统Sb
,
设系统的状态方程与输出方程为
 当输入f(t)=δ(t)时状态变量的零状态解和系统的零状态响应分别为 [*466 1] 求系统的A、B、C、D矩阵。
当输入f(t)=δ(t)时状态变量的零状态解和系统的零状态响应分别为 [*466 1] 求系统的A、B、C、D矩阵。
n阶线性定常系统的状态方程和输出方程为:
 若用X=Pz对系统进行线性变换,试对下面两个问题进行分析(要求给出分析过程)。 (1)线性变换是否改变u到y的传递函数矩阵? (2)线性变换是否改变系统的可控性?
若用X=Pz对系统进行线性变换,试对下面两个问题进行分析(要求给出分析过程)。 (1)线性变换是否改变u到y的传递函数矩阵? (2)线性变换是否改变系统的可控性?