 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
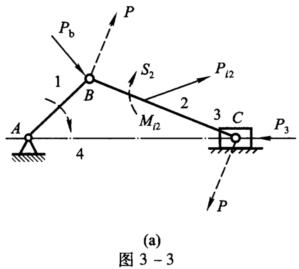
在图3-3a所示的曲柄滑块机构中,已知加于连杆重心S2上的惯性力Pi2和惯性力偶矩Mi2加于活塞上的外
在图3-3a所示的曲柄滑块机构中,已知加于连杆重心S2上的惯性力Pi2和惯性力偶矩Mi2加于活塞上的外力P3(其中包括活塞的惯性力)。求加于曲柄销B的切向平衡力Pb或加于曲柄轴上的平衡力矩。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
在图3-3a所示的曲柄滑块机构中,已知加于连杆重心S2上的惯性力Pi2和惯性力偶矩Mi2加于活塞上的外力P3(其中包括活塞的惯性力)。求加于曲柄销B的切向平衡力Pb或加于曲柄轴上的平衡力矩。
如果结果不匹配,请 联系老师 获取答案
 更多“在图3-3a所示的曲柄滑块机构中,已知加于连杆重心S2上的惯…”相关的问题
更多“在图3-3a所示的曲柄滑块机构中,已知加于连杆重心S2上的惯…”相关的问题
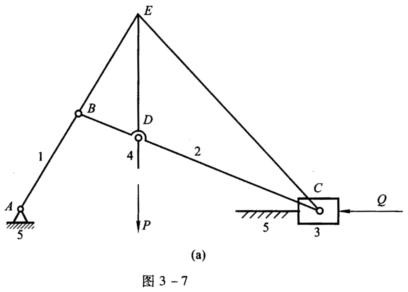
图3-7a所示曲柄滑块机构,已知其工作载荷Q作用在滑块上,而平衡力P通过构件4垂直作用于连杆2上,求图示位置时各运动副中的反力及平衡力P的大小。
用题图(a),(b)所示曲柄滑块机构和摆动导杆杆组通过轨迹点串联组台,来实现导杆在单边有较长时间的停歇特性。已知曲柄滑块机构尺寸为,lAB=20mm,lBC=40mm,lBD=90mm。D点的轨迹图如图(b)所示,小圆圈边数字为对应的曲柄转角及位置。要求导杆摆动角度ψ=40°。


在图(a)所示曲柄滑块机构中,有圆形槽的滑块作直线运动。其中曲柄长l=30mm,圆形槽半径R=25mm。在φ=30°时,滑块以速度v=0.2m/s、加速度a=1.5m/s2向左平动,求该瞬时曲柄OP的角速度和角加速度。

在图所示机构中,滑块3的质量为m3,曲柄AB长为r,滑块3的速度v3=ω1rsinθ,ω1为曲柄的角速度。当θ=0°~180°时,阻力F为常数;当θ=180°~360°时,阻力F=0,驱动力矩M为常数。曲柄AB绕A轴的转动惯量为JA1,不计构件2的质量及各运动副中的摩擦。设在θ=0°时,曲柄的角速度为-ω0。

图1.12-4(a)所示为滑块机构的部分装配图,已知零件尺寸为A1=

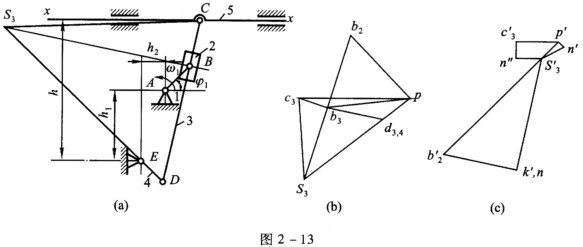
已知图2-13所示的牛头刨机构中,h=400 mm,h1=200 mm,h2=60 mm,lAB=100 mm,lED=90 mm,lCD=470 mm,φ1=45。,曲柄以等角速度ω1=5 rad/s逆时针转动,试求刨头5的速度和加速度。
A.曲柄摇杆
B.双曲柄
C.双摇杆


















