 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
系统动态方程为: 在输入u(t)=eλt的作用下,如何选取λ和初始状态X(0)可使系统的输出y恒为零。
系统动态方程为:
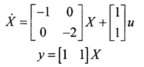 在输入u(t)=eλt的作用下,如何选取λ和初始状态X(0)可使系统的输出y恒为零。
在输入u(t)=eλt的作用下,如何选取λ和初始状态X(0)可使系统的输出y恒为零。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
系统动态方程为:
在输入u(t)=eλt的作用下,如何选取λ和初始状态X(0)可使系统的输出y恒为零。
如果结果不匹配,请 联系老师 获取答案
 更多“系统动态方程为: 在输入u(t)=eλt的作用下,如何选取λ…”相关的问题
更多“系统动态方程为: 在输入u(t)=eλt的作用下,如何选取λ…”相关的问题
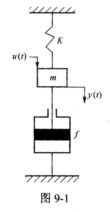
假设图9-1所示线性系统,外力u(t)是系统的输入量,质量的位移y(t)是系统的输出量,试写出该系统的状态空间方程;然后根据状态空间方程写出系统的传递函数。
某动态电路的输入-输出方程为
其中r(0)及r'(0)不为0. 求r(t)的像函数(其中a1,a0为常数).[利用微分性质]
在连续系统中信号f(t)经理想微分器后的输出
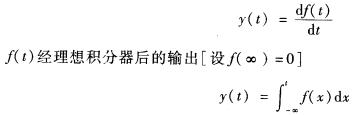 它是f(t)曲线下的面积。 现用数字系统进行仿真。设取样间隔为T,连续信号f(t)在t=kT时的样值 f(kT)=f(k)|t=kT 如题6.45图所示。
它是f(t)曲线下的面积。 现用数字系统进行仿真。设取样间隔为T,连续信号f(t)在t=kT时的样值 f(kT)=f(k)|t=kT 如题6.45图所示。
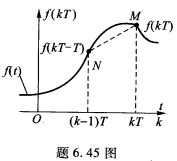 (1)数字微分器。 若取MN直线的斜率y(kT)近似f(t)在t=kT的导数。求该数字微分器输出y(kT)与输入f(kT)的差分方程,系统函数和频率响应; (2)数字积分器。 按梯形积:分公式,用y(kT)表示从一∞~k的一系列梯形面积之和,并用y(kT)近似f(t)(从一∞~t)的积分。求该数字积分器输出y(kT)与输入f(kT)的差分方程,系统函数和频率响应。
(1)数字微分器。 若取MN直线的斜率y(kT)近似f(t)在t=kT的导数。求该数字微分器输出y(kT)与输入f(kT)的差分方程,系统函数和频率响应; (2)数字积分器。 按梯形积:分公式,用y(kT)表示从一∞~k的一系列梯形面积之和,并用y(kT)近似f(t)(从一∞~t)的积分。求该数字积分器输出y(kT)与输入f(kT)的差分方程,系统函数和频率响应。
在教材中曾介绍的倒立摆系统重绘于图。图中,摆长为L,不计长杆质量,末端小球质量为m,θ(t)是偏离垂线之角度,重力加速度为g,a(t)是小车加速度,x(t)表示扰动(如风吹)引起的角加速度。质量沿垂直于杆方向的加速度
此模型为非线性微分方程,在摆处于垂直位置附近,即θ(t)很小的情况下,取如下近似:sin[θ(t)]≈θ(t),cos[θ(t)]≈1,得到如下简化的线性方程
曾介绍的倒立摆系统,现重绘于下图。图中,摆长为L,不计长杆质量,末端小球质量为m,θ(t)是偏离垂线之角度,重力加速度为g,a(t)是小车加速度,x(t)表示扰动(如风吹)引起的角加速度。质量沿垂直于杆方向的加速度

此模型为非线性微分方程,在摆处于垂直位置附近,即θ(t)很小的情况下,取如下近似:sin[θ(t)]≈θ(t),cos[θ(t)]≈1,得到如下简化的线性方程
在平面
a) 求方程(2.4)的特征.
b) 对于哪些α,方程(2.4)的任何无穷次可微的解u(t,x)也是方程(2.5)的解?
对于b)小题中求出的参数α的每一个值:
c) 求方程(2.5)的特征.
d) 指出方程(2.5)的某个解u(t,x),但它不是方程(2.4)的解,或者证明这样的解不存在.
e) 对有界解讨论与d)同样的问题.
在图3-13所示电路中,如将电源改为冲激函数u=12δ(t),电路的原始状态改为i1(0-)=2A,i2(0-)=0,电路参数不变。试以电压uab和ubc为输出变量写出输出方程,并用复频域法解输出方程,求出uab(t)和ubc(t)。
图所示电路中,非线性电阻的特性方程为i=g(u)=

已知一线性微分方程为
设u(t)=6·1(t),初始条件为y'(0)=2,y(0)=2,试用拉氏变换法求解该方程。

















